3.1. Środowisko testowe¶
Do budowania i testowania robotów używamy pakietu rgkit. Działa on pod Pythonem 2 i 3, ale symulator, który jest nieocenionym narzędziem testowania robotów, działa tylko w Pythonie 2. W Linuksie Pythona 2 trzeba doinstalować:
~$ sudo apt install python2-minimal
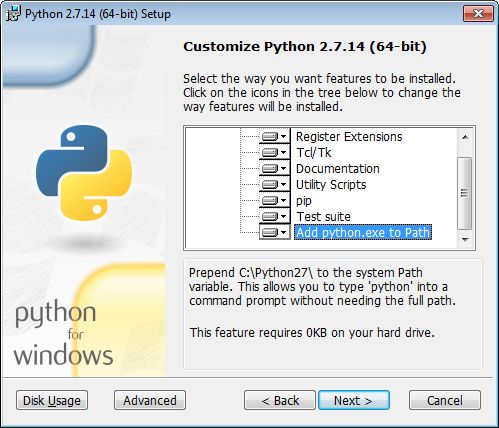
W MS Windows na stronie Python Releases klikamy link Latest Python2 Release i pobieramy instalator Windows x86-64 MSI installer (wersja 64-bitowa). Podczas instalacji zaznaczamy opcję “Add python.exe to path”.
Środowisko deweloperskie przygotujemy w katalogu robot.
Informacja
W polecanych przez nas dystrybucjach Linux Live środowisko testowe jest już przygotowane.
W terminalu wydajemy polecenia:
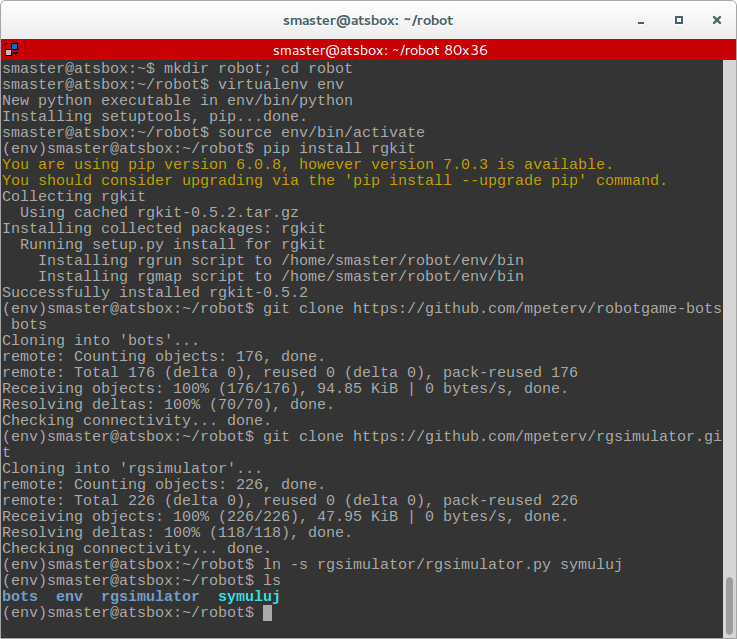
~$ mkdir robot; cd robot
~robot$ virtualenv -p python2.7 env
~robot$ source env/bin/activate
(env):~/robot$ pip install git+https://github.com/outkine/rgkit.git
Informacja
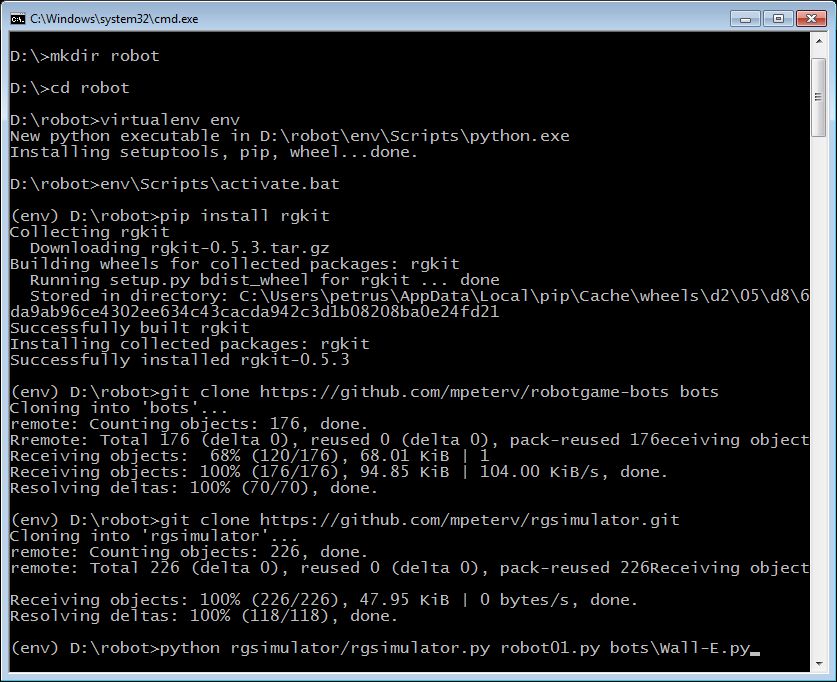
W systemie Windows:
- po instalacji Pythona 2, trzeba doinstalować narzędzie do tworzenia
wirtualnego środowiska poleceniem w terminalu:
pip2 install virtualenv, - polecenie aktywujące środowisko wirtualne będzie miało postać
env\Scripts\activate.bat.
Dodatkowo instalujemy pakiet zawierający roboty open source, następnie symulator ułatwiający testowanie, a na koniec tworzymy skrót do jego uruchamiania:
(env):~/robot$ git clone https://github.com/mpeterv/robotgame-bots bots
(env):~/robot$ git clone https://github.com/mpeterv/rgsimulator.git
(env):~/robot$ ln -s rgsimulator/rgsimulator.py symuluj
Po wykonaniu wszystkich powyższych poleceń i komendy ls -l powinniśmy zobaczyć:
Kolejne wersje robota proponujemy zapisywać w plikach robot01.py, robot02.py itd. Będziemy mogli je uruchamiać lub testować za pomocą poleceń:
(env)~/robot$ rgrun robot01.py robot02.py
(env)~/robot$ rgrun bots/stupid26.py robot01.py
(env)~/robot$ python ./symuluj robot01.py
(env)~/robot$ python ./symuluj robot01.py robot02.py
3.1.1. Obsługa symulatora¶
- Klawisz F: utworzenie robota-przyjaciela w zaznaczonym polu.
- Klawisz E: utworzenie robota-wroga w zaznaczonym polu.
- Klawisze Delete or Backspace: usunięcie robota z zaznaczonego pola.
- Klawisz H: zmiana punktów HP robota.
- Klawisz C: wyczyszczenie planszy gry.
- Klawisz Spacja: pokazuje planowane ruchy robotów.
- Klawisz Enter: uruchomienie rundy.
- Klawisz G: tworzy i usuwa roboty w punktach wejścia (ang. spawn locations), “generowanie robotów”.
Uwaga
Opisana instalacja zakłada użycie środowiska wirtualnego, które przed uruchomieniem rozgrywki
lub symulacji trzeba aktywować w katalogu robot poleceniem
source env/bin/activate (Linux) lub env\\Scripts\\activate.bat (Windows).
 Materiały Python 101
udostępniane przez
Centrum Edukacji Obywatelskiej na licencji
Creative Commons Uznanie autorstwa-Na tych samych warunkach 4.0 Międzynarodowa.
Materiały Python 101
udostępniane przez
Centrum Edukacji Obywatelskiej na licencji
Creative Commons Uznanie autorstwa-Na tych samych warunkach 4.0 Międzynarodowa.
| Utworzony: | 2022-05-22 o 19:52 w Sphinx 1.5.3 |
|---|---|
| Autorzy: | Patrz plik “Autorzy” |